


France
Victor ROV
 |
Operator: IFREMER / French Navy Further Information Victor, dedicated to scientific ocean research, is a deepwater, remote-controlled system. It is instrumented and modular and can perform high quality optical imaging and can carry and operate various equipment and scientific tools. The lower part of the vehicle is composed of an instrumented scientific module which can be changed according to the type of assignment. It contains most of the instrumentation as well as the sampling basket. This modular system can also be enhanced and used as a technological platform for new equipment. |
AsterX AUV
 |
Operator: IFREMER Further Information The coastal AUV programme: Scientific survey down to 3000 m depth with medium size autonomous vehicles.Asterx key figures: depth rating 3000 m, length 4.5 m, total weight in air 793 kg including 200 kg payload displacement, autonomy 100 km max, speed up to 5 knt, optimized mono-hull design, 4 air transport LD3 containers. |
Nautile SUB
 |
Operator: IFREMER Further Information The Nautile is a manned submarine designed for observing and operating at depths reaching 6000 metres. Since its commissioning in 1984, it has logged nearly 1,500 dives from the research vessels Nadir or l'Atalante. Fields of operation includes exploration of specific zones, high precision bathymetry and physical measurements, Collecting samples and manipulating special tools, assistance for offshore assignments, cable and pipeline layouts and inspection search, location, investigation and assistance in raising wrecks and assistance for submersibles in distress. |
SAR towed acoustic system
 |
Operator: IFREMER Further Information The SAR is a high-resolution multisensor geophysical tool designed to study the geological nature and structure of deepwater seafloors (200 to 6000 m). It is a towed system whose sidescan imagery resolution (1 pixel per 25 cm) can perform detailed seabed studies to complement larger scale surveys (multibeam, wide coverage sonars). Since its commissioning in 1984, the SAR has made more than 450 dives, covering 17 000 km2 of seafloor, aboard Ifremer's research vessels, Suroît, Nadir, l'Atalante as well as on the Marion Dufresne, the Discovery and the Hudson. |
Germany
Kiel 6000 ROV
 Operator: GEOMAR
Operator: GEOMAR
Further Information
The ROV KIEL 6000 (remotely operated vehicle) has been designed for scientific purposes with an operational depth rating of 6000m.
Remote control, data communication and live video streams are facilitated by a deep-sea glass fibre cable. The glass fibres are enclosed in a 19mm thick cable which also provides the electrical power for the thruster, hydraulics, cameras and lights.
The vehicle is an electrically powered work class (class III) ROV which has been manufactured by Schilling Robotics, LLC, Davis, California. Its modular concept allows for different scientific payloads.
With a depth rating of 6000m it is capable of reaching 95% of the world’s seafloor. The ROV can be operated from ships of opportunity which fullfill certain requirements like dynamic positioning (DP), bearing capacity, electric and crane/winch capacity.
KIEL 6000 will be used for multidisciplinary scientific projects and for the installation and maintainance of ocean observatories.
Procurement of the ROV has been realised by the Schleswig-Holstein Fund.
PHOCA ROV
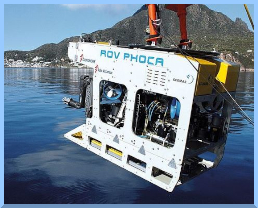 Operator: GEOMAR
Operator: GEOMAR
Further Information
The remotely operated vehicle ROV PHOCA is a deep diving platform rated for water depths of 3000 meters. The ROV is linked to a surface vessel via an umbilical cable transmitting power (copper wires) and data (3 single-mode glass bers). As standard it comes equipped with still and video cameras and two different manipulators providing eyes and hands in the deep. Special emphasis was put on the compatibility of numerous systems with the existing ROV KIEL 6000 to facilitate the use of both systems on various research vessels with a given team of ROV pilots. Besides this, a set of other tools may be added depending on the mission tasks, ranging from simple manipulative tools as chisels and shovels to electrically connected instruments which can send insitu data to the ship through the ROVs network, allowing immediate decisions upon manipulation or sampling strategies.
Netherlands
DEEP-SEA WINCH (Kley France)
 |
Operator: NIOZ Further Information Kevlar cabled traction winch for deep-sea work up to 8000 m. Special assistance is needed with this equipment. |
Ultra Clean CTD
 |
Operator: NIOZ Further Information To achieve contamination free seawater sampling and sub sampling in order to measure low concentrations of trace metals in seawater. For this reason A full titanium Ultra Clean CTD-frame, an Ultra Clean Container for sub-sampling and an clean transportation system to the Clean Container were developed. The Ultra Clean CTD Works normally in combination with the NIOZ Kevlar Cable Winch and GO-FLO CTD-bottles. |
Lab Containers
Operator: NIOZ
Further Information
Wet Lab Container: Standard 20 foot container, including ventilation and airco system.
Cooled Lab Container: Standard 20 foot container, including air-conditioning and ventilation system.
Clean Room Container: Standard 20 foot container, including air-conditioning, air filtration and ventilation system. Clean room class: 100 - 1.000.
Autoanalyzer Container: Standard 20 foot container, including ventilationsystem, airco, heating, Milli-RO and Milli-Q waterinstallation. Maximum 4 different nutrients can be analysed in 1 container with a maximum of 800 analyses per day.
Cool/Freeze Storage Container: Standard 20 foot container, including storage racks.
Office Container: Standard 20 foot container, including ventilation system.
Transport Container: Standard 20 foot container.
Special Purpose Containers:
- Oxygen & Salinity Analyzing lab
- Scanfish container
- Isotope laboratory
- Seismic Data Lab
- Ultra Clean CTD container
- XRF Core Scanner container
- Seismic Compressor container
- Isotope laboratory
Norway
Aglantha ROV
 |
Operator: IMR Further Information Development of the Argus Abyss ROV (project name Aglantha), a low cost and high performance scientific ROV for depths down to 2000 meters, together with the University of Bergen and the Hasselblad foundation. |
Kley France Calypso Corer System
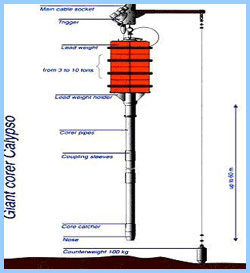 Operator: IMR
Operator: IMR
Further Information
The Calypso corer system was ordered from Kley France to be equipped on the new research vessel G.O. Sars, delivered April 2003. It consists of a corer sampler with a total weight of 3800 kg, a winch/drum and a control container. The Calypso corer is capable of making sedimental samples up to 22 meters at a depth of total 6000m, on the G.O. Sars version, and the 9 tonnes scientific winch is made for multi purpose use.
The winch and the drum is mounted on a 20ft container platform (separates into two 10ft platform to ease loading). The control is mounted in a 10ft container.
In addition to this there is a 10ft corer deployment platform, hydraulic adjustable, for launch/recovery operations.
The Calypso corer is released from the main cable approximately 1 meter above sea floor. An internal wire connected to a piston at the bottom of the corer helps neutralizing the pressure at impact and also connects the corer to main cable for recovery.
The system is powered by 440 VAC/ 60Hz.
ROV Ægir 6000
 |
Operator: IMR Further Information Norway’s new scientific remotely operated vehicle (ROV) has been christened Ægir, after the old Norse god of the sea, Being one of the few vehicles in the world able to dive as deeply as 6,000 meters |
United Kingdom
ISIS
 Operator: NERC
Operator: NERC
Further Information
ISIS is a remotely operated vehicle capable of descending to 6500m below the surface of the ocean.
An operator in the control van aboard the mother ship can guide the vehicle to precise locations by sending commands to the vehicle's thrusters. Once there, the operator can use the ROV's manipulators like arms and hands to do scientific tasks such as taking samples and deploying instruments. The operator can view the sea floor through up to 8 separate cameras mounted on the vehicle.
ISIS also has sophisticated sonar systems to make high resolution bathymetry maps of the sea floor as well as chemical sensors and a 'slurp' gun to take mid-water biological samples.
Autosub
 |
Operator: NERC Further Information Autonomous Underwater Vehicles (AUVs) are robot submarines, which are used to explore the world’s oceans without a pilot, or any tether. Before launch from the mother ship, the AUV’s computers are programmed with instructions about where to go, what to measure, and what depths to go to. With no link to the mother ship, all communications with the AUV are limited to using acoustics (sound) when the AUV is underwater (this typically has a range of a few km) or satellite communications (such as Iridium) can be used when the AUV is floating on the sea surface. |